LinuxCNC configuration
Sample Configuration Files
Sample LinuxCNC configuration files can be found in the Remora/LinuxCNC/ConfigSamples directory. To copy all the samples into your LinuxCNC configuration for experimentation or customizing do the following on the rPi in a terminal window:
cp -a ~/linuxcnc/Remora/LinuxCNC/ConfigSamples/* ~/linuxcnc/configs
When you next start LinuxCNC you will find these items under the “My Configurations” node of the LinuxCNC Configuration Selector window.
Understanding the LinuxCNC configuration
The following sections give some further details regarding the purpose and function of the different portions of the configuration files.
Loading realtime components
Along with the standard realtime components (kinematics and motion module) the Remora component needs to be loaded. This will expose the pins and allow the Remora functions to be added to the servo thread.
# load the realtime components
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT base_period_nsec=[EMCMOT]BASE_PERIOD servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
# component selection is based on board/chip type. Uncomment based on your board
# for STM32 based boards
loadrt remora-spi
# for LPC17xx based boards
#loadrt remora_lpc
Joint Control Type
Configuration the control mode for each individual joint. Options are Velocity or Position mode. Joints default to position mode.
loadrt remora-spi ctrl_type=v,v,p
chip_type
SPI_clk_div
loadrt remora-spi SPI_clk_div=32
PRU_base_freq
loadrt remora-spi SPI_clk_div=32 PRU_base_freq=40000
E-Stop Loop
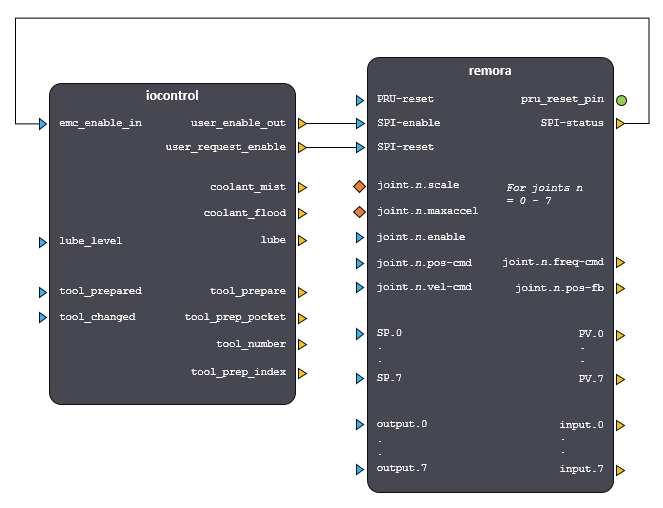
To alert and stop LinuxCNC if SPI communication with the controller board cannot be estabilished, or if it is lost during operation, the Remora component is included as part of the LinuxCNC E-Stop loop. The HAL configuration is shown below.
# estop loopback, SPI comms enable and feedback
net user-enable-out <= iocontrol.0.user-enable-out => remora.SPI-enable
net user-request-enable <= iocontrol.0.user-request-enable => remora.SPI-reset
net remora-status <= remora.SPI-status => iocontrol.0.emc-enable-in
Diagramatically this is shown in the following figure.
Adding functions to threads
The servo thread is used to communicate with the controller board and perform motion calculations. Functions are added in the order of execution. Firstly data is read from the controller board (remora.read), motion is then computed, stepper frequencies are calculated (remora.update-freq) and then the data is written to the controller board (remora.write).
# add the remora and motion functions to threads
addf remora.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf remora.update-freq servo-thread
addf remora.write servo-thread